
Zprávy
 Domov / Zprávy / Zprávy průmyslu / Jak si vyberete správný horizontální otočný pohon pro vaši aplikaci?
Domov / Zprávy / Zprávy průmyslu / Jak si vyberete správný horizontální otočný pohon pro vaši aplikaci? Jak si vyberete správný horizontální otočný pohon pro vaši aplikaci?
 2026.05.13
2026.05.13
 Zprávy průmyslu
Zprávy průmyslu
Výběr správného horizontálního otočného pohonu je jedním z těch rozhodnutí, která na povrchu vypadají přímočaře, ale když se ponoříte do požadavků aplikace, rychle odhalí vrstvy složitosti. Špatný výběr není jen podprůměrný – selhává předčasně, vytváří zátěž na údržbu a v systémech kritických z hlediska bezpečnosti může způsobit nákladné prostoje nebo nehody. Tento průvodce projde každou smysluplnou proměnnou výběru a poskytne inženýrům a specialistům na nákup praktický rámec pro uskutečnění správného hovoru hned napoprvé.
Co vlastně dělá horizontální otočný pohon
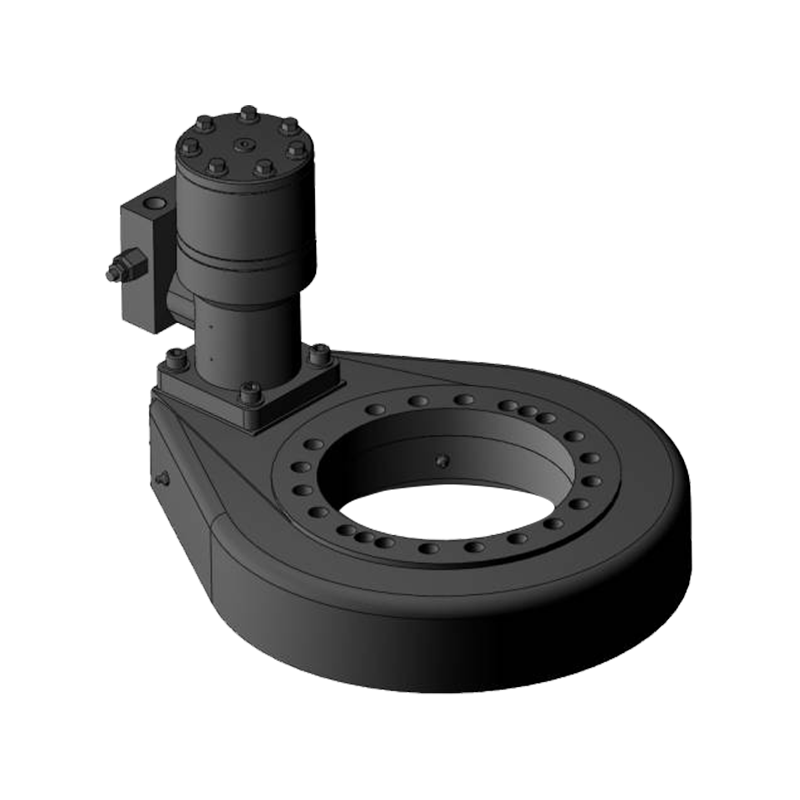
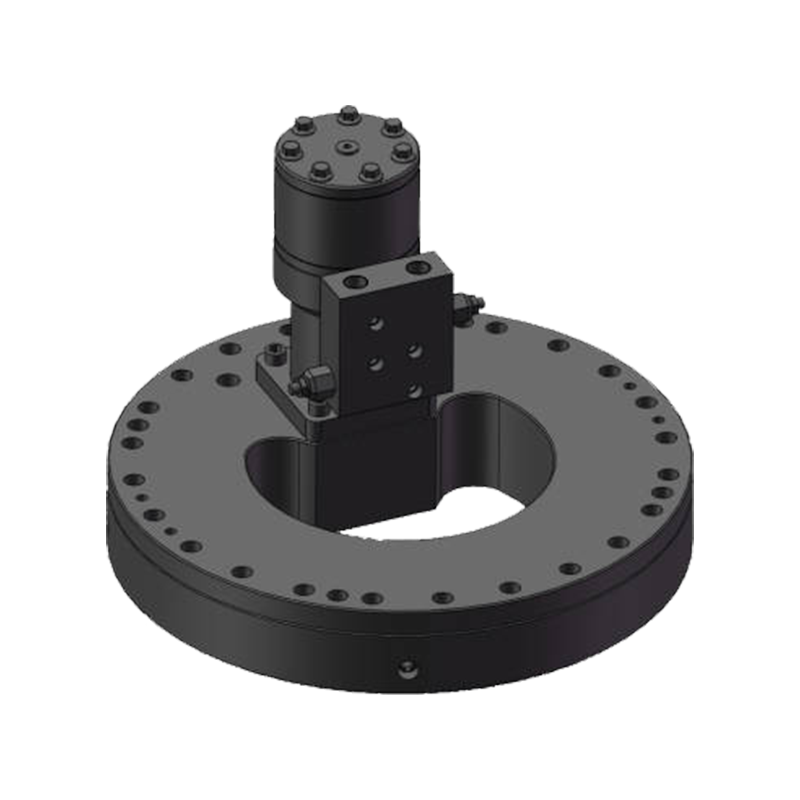
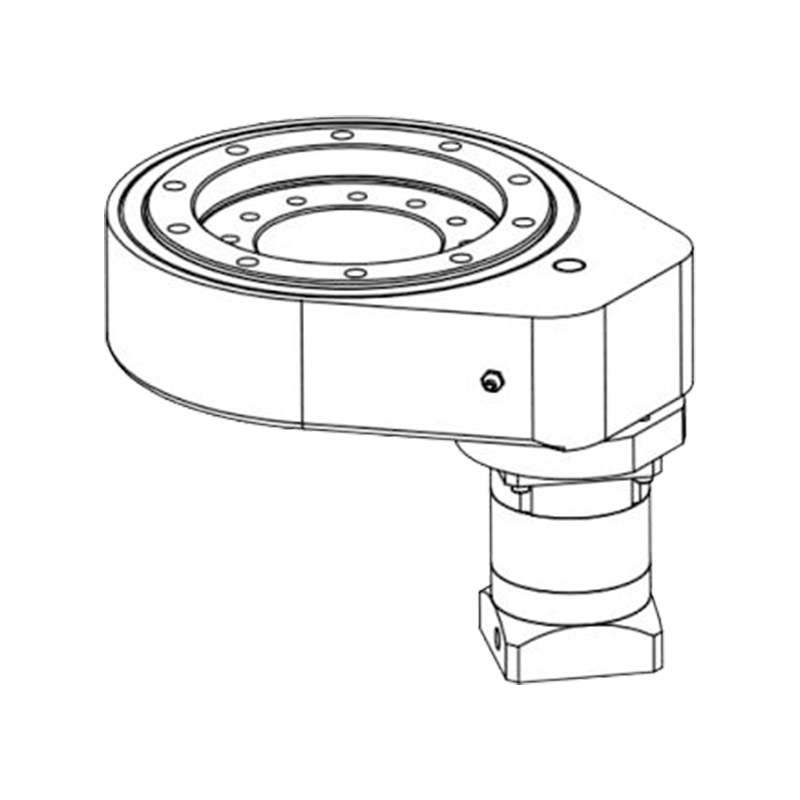
Horizontální otočný pohon je plně uzavřený otočný pohon, který kombinuje šnekový redukční mechanismus s ložiskem otočného kroužku v jediném integrovaném krytu. Otočný věnec zvládá radiální, axiální a momentová zatížení vyvolaná rotační konstrukcí výše, zatímco šnekové kolo poskytuje mechanickou výhodu potřebnou k pohonu této rotace s relativně malým příkonem motoru. „Horizontální“ označuje orientaci výstupní osy měniče – k rotaci dochází kolem svislé osy, což z ní činí přirozenou volbu pro aplikace, kde se konstrukce musí kývat, posouvat nebo nepřetržitě otáčet v horizontální rovině.
Na rozdíl od samostatných otočných kroužků spárovaných s externími převodovkami zjednodušuje integrovaný horizontální otočný pohon instalaci, zlepšuje integritu těsnění a snižuje inženýrské úsilí potřebné k návrhu okolní konstrukce. Tato integrace je přesně důvodem, proč dominují aplikacím, jako jsou solární sledovače, jeřábové točny, vzdušné pracovní plošiny, systémy natáčení větrných turbín a polohovače satelitní antény – všude tam, kde je vyžadováno kompaktní, samostatné otočné ovládání s vysokou nosností.
Analýza zatížení: Výchozí bod, o kterém nelze vyjednávat
Každý výběr horizontálního otočného pohonu začíná kompletní analýzou zatížení. Přeskočení nebo přiblížení tohoto kroku je jediným nejčastějším zdrojem předčasného selhání. Existují tři kategorie zatížení, které musí disk současně zvládnout, a všechny tři je nutné kvantifikovat před zahájením jakéhokoli katalogového srovnání.
Axiální zatížení
Axiální zatížení působí rovnoběžně s výstupní osou pohonu – u horizontálního otočného pohonu je to typicky vlastní hmotnost rotující konstrukce nahoře. Pole solárních panelů, nástavba jeřábové točny nebo sestava antény, to vše působí svou hmotností směrem dolů přes pohon. Toto je nejpřímější výpočet zatížení: je to v podstatě celková hmotnost všeho rotujícího nad pohonem, vynásobená gravitačním zrychlením a vyjádřená v kilonewtonech.
Radiální zatížení
Radiální zatížení působí kolmo na výstupní osu — horizontálně, v případě horizontálního otočného pohonu. Tlak větru na velký panel nebo anténu je nejčastějším zdrojem radiálního zatížení ve venkovních aplikacích. Excentrické zatížení způsobené mimostředným těžištěm v rotující sestavě také přispívá k radiální složce. Radiální zatížení jsou často dynamická a směrově proměnná, proto je kritický spíše odhad špičkové hodnoty než výpočet průměrné hodnoty.
Okamžik převrácení
Překlopný moment je ohybové zatížení, které se pokouší naklonit rotační konstrukci vzhledem ke skříni pohonu. Generuje se vždy, když těžiště rotující sestavy není přímo nad rotační osou měniče, nebo když horizontální síly (jako vítr) působí ve výšce nad montážní rovinou měniče. Překlopný moment je vyjádřen v kilonewtonmetrech a je často nejnáročnějším parametrem zatížení – mnoho pohonů, které projdou kontrolou axiálního a radiálního zatížení, selhává na kapacitě překlápěcího momentu.
Požadavky na točivý moment a dimenzování motoru
Jakmile jsou zatížení stanovena, je třeba vypočítat požadovaný výstupní moment. Jedná se o moment potřebný na výstupním kroužku měniče k překonání všech odporových sil a zrychlení zátěže na požadovanou rychlost otáčení v přijatelném čase. Hlavními přispěvateli k požadovanému točivému momentu jsou tření v ložisku otočného kroužku (které se zvyšuje s axiálním zatížením a klopným momentem), aerodynamický odpor na rotující konstrukci a setrvačný moment potřebný během fází zrychlení.
Horizontální otočné pohony jsou specifikovány jejich jmenovitým přídržným momentem a jmenovitým pracovním momentem – tyto hodnoty nejsou stejné. Přídržný moment je maximální statické zatížení, které může měnič unést bez otáčení; pracovní moment je trvalý moment dostupný během provozu. Samosvorná charakteristika šnekového převodu (přítomná, když je úhel náběhu pod úhlem tření, typicky když převodový poměr překročí přibližně 20:1) znamená, že mnoho horizontálních otočných pohonů může udržet svou polohu pod zatížením bez samostatné brzdy – funkce, která zjednodušuje konstrukci systému v aplikacích, jako jsou solární sledovače, kde musí pohon držet úhel panelu proti zatížení větrem bez nepřetržitého napájení motoru.
Volba motoru vyplývá z požadovaného vstupního momentu (výstupní moment dělený převodovým poměrem, upravený pro účinnost pohonu) a požadovaných vstupních otáček (výstupní otáčky vynásobené převodovým poměrem). Většina horizontálních otočných pohonů přijímá standardní rámové motory IEC nebo NEMA a mnohé z nich jsou dodávány připravené pro motor s obrobenou montážní přírubou motoru.
Porovnání klíčových parametrů výběru
| Parametr | Co určit | Společný rozsah | Riziko výběru, pokud není specifikováno |
| Axiální zatížení Capacity | Celková rotující hmotnost × gravitace | 5 kN – 2 000 kN | Deformace ložiskového kroužku, zadření |
| Okamžik převrácení | Excentrické zatížení × rameno momentu | 0,5 kNm – 500 kNm | Porucha zubu věnce, naklápění |
| Pracovní točivý moment | Moment setrvačnosti třecího odporu | 0,5 kNm – 200 kNm | Přetížení motoru, opotřebení šnekového převodu |
| Výstupní rychlost | Požadovaná rychlost přeběhu (°/min nebo otáčky za minutu) | 0,01 – 10 ot./min | Chyba polohování, teplotní překročení |
| Převodový poměr | Potřeba samosvornosti vs. účinnost | 20:1 – 100:1 | Zpětný chod, potřeba brzdy |
Ohledy na životní prostředí a pracovní cyklus
Jednotka, která vyhovuje papírovým požadavkům na mechanické zatížení, může stále předčasně selhat, pokud jsou specifikace prostředí nesprávné. Horizontální otočné pohony jsou široce používány venku, často v náročných podmínkách, a kryt, těsnění a povrchová úprava musí být přizpůsobeny provoznímu prostředí.
- IP hodnocení: Pro venkovní aplikace je obecně vyžadováno minimálně IP65, aby se zabránilo prachu a tryskající vodě. Mořské nebo přímořské prostředí vyžaduje IP67 nebo vyšší, s nerezovými spojovacími prvky a dodatečnou ochranou proti korozi na exponovaných površích. Ujistěte se, že krytí IP platí pro plně sestavený měnič včetně rozhraní motoru – některé měniče mají stupeň krytí IP65 na krytu, ale mají nechráněné montážní plochy motoru, které se stávají vstupními body.
- Rozsah teplot: Standardní maziva fungují dobře mezi -20 °C a 80 °C. Aplikace v arktických prostředích, pouštních instalacích nebo v blízkosti průmyslových zdrojů tepla vyžadují specifická maziva pro nízké nebo vysoké teploty. Před dokončením výběru pro použití v extrémních klimatických podmínkách si ověřte specifikaci maziva výrobce měniče a teplotní rozsah, který pokrývá.
- Pracovní cyklus: Horizontální otočné pohony in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Ochrana proti korozi: Standardní pohony používají ocelová pouzdra opatřená základním nátěrem zinkofosfátem a lakovaná, vhodná pro vnitrozemská prostředí. Pobřežní a pobřežní instalace vyžadují žárově zinkovaná pouzdra, výstupní kroužky z nerezové oceli nebo povrchy s epoxidovým nátěrem v závislosti na kategorii korozivnosti místa.
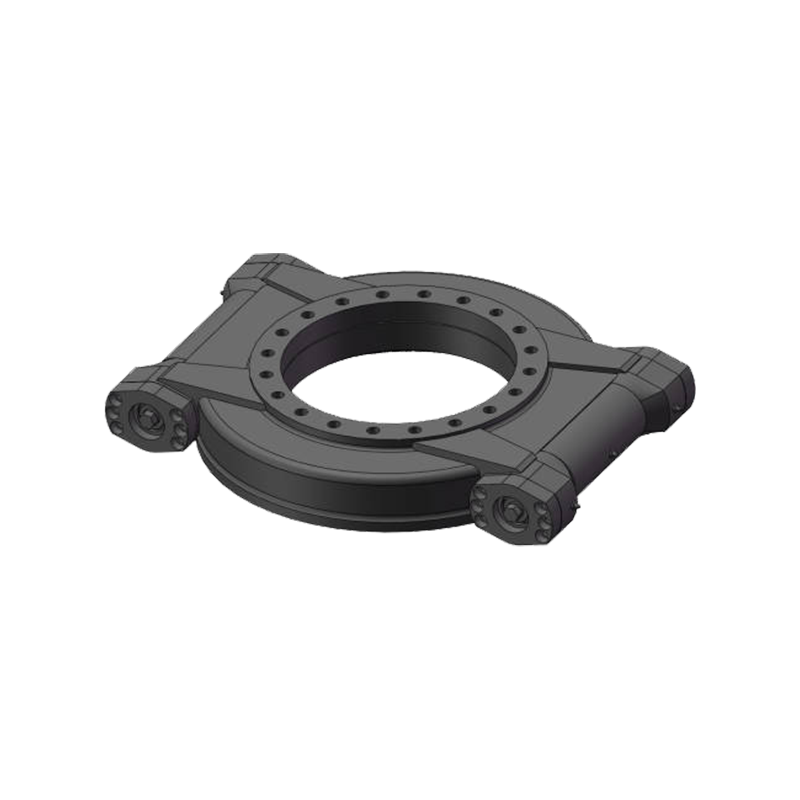
Montážní konfigurace a geometrie rozhraní
Fyzická integrace otočného pohonu do okolní konstrukce je praktickým omezením, které je nutné vyřešit při výběru, nikoli při instalaci. Horizontální otočné pohony jsou k dispozici s různými konfiguracemi výstupního kroužku — vnější ozubené kolo (zuby na vnější straně výstupního kroužku), vnitřní ozubené kolo (zuby na vnitřní straně) a bezzubí (poháněné třením nebo přímé spojení) – každý vhodný pro různá kinematická uspořádání. Externí výstupní kroužky převodovky jsou nejběžnější a umožňují umístění šnekového hřídele mimo průměr kroužku, čímž je motor a převodovka přístupné pro údržbu. Konfigurace s vnitřním ozubením se používají, když musí být pohon integrován do kompaktní rotační sestavy.
Rozměry šroubových kružnic jak na pevném krytu, tak na otočném výstupním kroužku musí být ověřeny vůči protilehlé konstrukci. Mnoho výrobců nabízí přizpůsobené vzory šroubů, montážní příruby a rozhraní výstupních hřídelů jako standardní možnosti – jejich specifikace ve fázi objednávky je mnohem levnější než obrábění adaptérů v terénu. Ověřte také průměr průchozího otvoru, pokud kabely, hydraulická vedení nebo pneumatické hadice musí procházet středem pohonu – ne všechny horizontální otočné pohony nabízejí středový otvor a dodatečná montáž této funkce není možná.

Bezpečnostní faktory a očekávání životnosti
Publikované jmenovité únosnosti pro horizontální otočné pohony jsou obvykle založeny na výpočtech statického důkazního zatížení nebo dynamické únavové životnosti a použití vhodného bezpečnostního faktoru nad vypočtené provozní zatížení je standardní technickou praxí. Pro většinu aplikací, které nejsou kritické z hlediska bezpečnosti, je vhodný bezpečnostní faktor 1,5× až 2× u pracovního momentu a nosnosti. Pro aplikace, kde selhání pohonu představuje riziko pro personál – zvedací pracovní plošiny, lékařská polohovací zařízení nebo jeřáby na vozidle – mohou být specifikovány bezpečnostní faktory 3× nebo vyšší a certifikace třetí strany podle příslušných bezpečnostních norem pro stroje (jako je EN 13000 pro jeřáby nebo ISO 11684 pro zemědělské vybavení) by měla být potvrzena výrobcem pohonu.
Očekávaná životnost by měla být diskutována z hlediska životnosti ložisek L10 (počet provozních hodin, při kterých by se očekávalo, že 10 % populace identických pohonů vykáže poruchu únavou ložiska) a únavové životnosti povrchu šnekového kola. U aplikací pro sledování slunečního záření je průmyslovou normou 25letá návrhová životnost; potvrdit, že výpočet životnosti L10 výrobce je založen na profilu skutečného provozního zatížení aplikace, nikoli na obecné referenční podmínce.
Praktický kontrolní seznam před dokončením výběru
- Potvrďte axiální zatížení, špičkové radiální zatížení a maximální klopný moment za nejhorších podmínek (obvykle maximální rychlost větru kombinovaná s maximálním excentrickým zatížením)
- Ověřte, že jmenovitý pracovní moment zvoleného měniče překračuje vypočtený požadovaný výstupní moment o zvolený bezpečnostní faktor
- Pokud je požadováno pasivní držení polohy, zkontrolujte převodový poměr pro samosvornost, nebo potvrďte specifikaci brzd, pokud tomu tak není
- Potvrďte, že krytí IP, teplotní rozsah a ochrana proti korozi odpovídají prostředí instalace
- Ověřte rozměry kružnice šroubu, konfiguraci výstupního kroužku a požadavky na středovou díru podle návrhu protilehlé konstrukce
- Vyžádejte si výpočet životnosti ložiska L10 na základě skutečného profilu zatížení aplikace, nikoli referenčních podmínek katalogu
- Ověřte kompatibilitu rozhraní motoru – velikost rámu, průměr hřídele a standard montážní příruby (IEC nebo NEMA)
- Zkontrolujte specifikaci mazání a interval domazávání oproti plánovanému plánu údržby
Výběr horizontálního otočného pohonu odměňuje metodickou analýzu. Samotné pohony jsou robustní, dobře osvědčené komponenty – poruchy, ke kterým dochází v terénu, lze téměř vždy vysledovat k nedostatečně specifikovanému parametru zatížení, neodpovídajícímu hodnocení prostředí nebo přehlíženému omezení rozhraní. Systematicky procházejte každou z výše uvedených proměnných, zapojte technickou podporu výrobce, když jsou podmínky aplikace neobvyklé, a výsledkem bude pohon, který spolehlivě funguje po celou zamýšlenou životnost systému, který pohání.

Jiangsu Manchen Transmission Technology Co., Ltd. vyniká ve vytváření vlastních, spolehlivých a přesných ložisek pro různá průmyslová odvětví, neustále inovuje, aby splňovala nejvyšší standardy a hledala příležitosti pro spolupráci. Spolehlivé a stabilní dodavatel ložisek v Číně.
Produktové odkazy
Kontaktujte nás
-
Address:Č. 8, Nanqiu Road, Huangtu Town, Jiangyin City , Čína
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
