
Zprávy
 Domov / Zprávy / Zprávy průmyslu / Jak lze optimalizovat rychlost rotačního a přesnosti dutých rotačních platforem pro aplikace s vysokou přesností?
Domov / Zprávy / Zprávy průmyslu / Jak lze optimalizovat rychlost rotačního a přesnosti dutých rotačních platforem pro aplikace s vysokou přesností? Jak lze optimalizovat rychlost rotačního a přesnosti dutých rotačních platforem pro aplikace s vysokou přesností?
 2025.04.18
2025.04.18
 Zprávy průmyslu
Zprávy průmyslu
Optimalizace rychlosti rotace a přesnost Duté rotační plošiny Pro aplikace s vysokou přesností vyžaduje pozornost několika konstrukčních a inženýrských faktorů. Zde je návod, jak můžete dosáhnout této optimalizace:
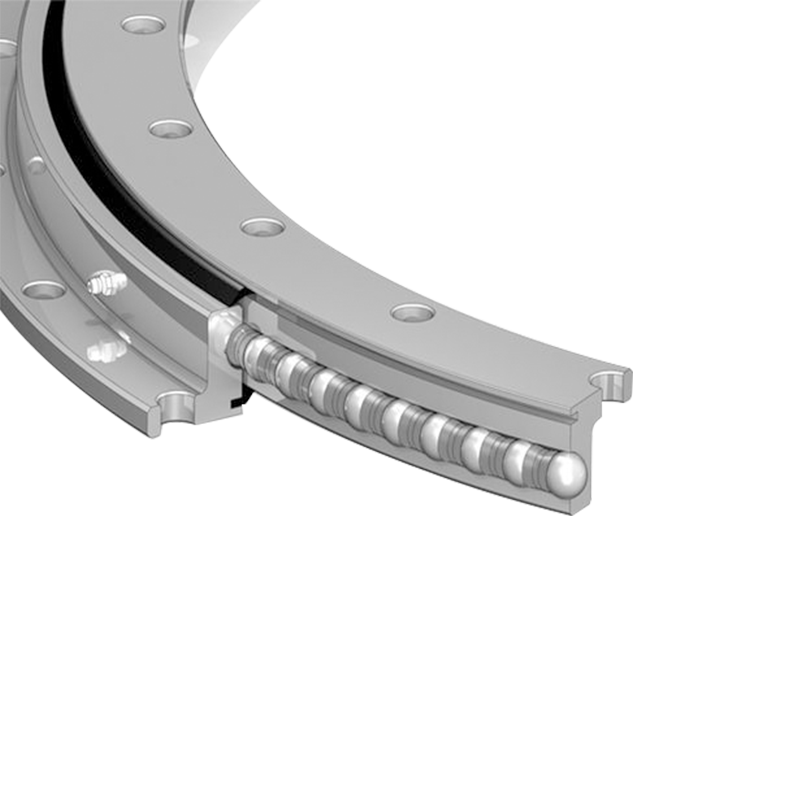
1. Přesná ložiska
-
Vysoce kvalitní ložiska: Výběr přesných ložisek je zásadní při minimalizaci tření a zajištění hladké rotace. Keramická nebo hybridní ložiska, která jsou vyrobena z kombinace keramiky a oceli, nabízejí vynikající přesnost, snížené opotřebení a vyšší rychlostní schopnosti ve srovnání s tradičními kovovými ložiskami.
-
Předpětí načtení: Použití předpětí na ložiska může minimalizovat axiální hru a zlepšit stabilitu platformy. To také pomáhá při dosahování přesnějšího pohybu, zejména při vyšších otáčkách.
2. Hnací systémy
-
Servo motory: U aplikací vyžadujících vysokou přesnost může používání servomotorů nebo krokových motorů poskytnout přesnější kontrolu rychlosti a polohování otáčení. Tyto motory jsou schopny jemné úpravy a konzistentní rotační rychlosti, které jsou nezbytné při vysoce přesných úkolech.
-
Řídicí systémy s uzavřenou smyčkou: Řídicí systém s uzavřenou smyčkou, který nepřetržitě monitoruje a upravuje rychlost motoru, může udržovat požadovanou rychlost otáčení i při různých zátěžích. Tím je zajištěna konzistentní přesnost během provozu platformy.
-
Systémy převodovky nebo redukční převodovky: Pokud se rotační platforma potřebuje otáčet pomalejšími rychlostmi, ale s vysokým točivým momentem a přesností může integrace převodovky s vhodnými redukčními poměry umožnit jemnou kontrolu nad rychlostí otáčení a přesnosti polohy.
3. Zpětná vazba a senzory
-
Kodéry: Optické nebo magnetické kodéry s vysokým rozlišením poskytují zpětnou vazbu o poloze a rychlosti rotační platformy, což umožňuje úpravám v reálném čase udržovat přesnost. Tyto kodéry mohou detekovat drobné změny v poloze a rychlosti, což umožňuje jemné doladění výkonu platformy.
-
Lineární variabilní diferenciální transformátor (LVDT): Pro extrémně vysoce přesné aplikace lze LVDT použít ke sledování jakýchkoli posunů v poloze nebo pohybu platformy. Tyto senzory mohou poskytnout zpětnou vazbu na rotaci platformy na úrovni submicronu.
-
Systémy zpětné vazby s uzavřenou smyčkou: Tyto systémy, integrované s motory a kodéry, umožňují nepřetržité úpravy, aby se zajistilo, že rychlost a poloha rotace jsou udržována s vysokou přesností během provozu.
4. Strukturální design a výběr materiálu
-
Materiály s nízkou hmotností a vysokou pevností: Použití materiálů, jako jsou slitiny hliníku, uhlíkové vlákno nebo lehké kovy pro strukturu platformy, pomáhá snižovat setrvačnost, což může zlepšit jak rychlost, tak přesnost. Tyto materiály také přispívají ke snížení vibrací a zvýšení dynamické odezvy během rotace.
-
Minimalizace deformace: Zajištění strukturální integrity platformy je nezbytné pro udržení přesnosti. Použití robustních, tuhých materiálů a pečlivého designu ke snížení ohýbání nebo deformace platformy minimalizuje jakékoli potenciální zdroje chyb během vysokorychlostní rotace.
5. Tlumení vibrací
-
Systémy tlumení: Vibrace mohou být významným faktorem ovlivňujícím přesnost, zejména při vysokých otáčkách. Začlenění tlumení systémů, jako jsou viskoelastické materiály, izolátory vibrací nebo aktivní tlumicí zařízení, může snížit účinky vnějších vibrací a vnitřní oscilace.
-
Vyvažování: Správné vyvážení platformy je zásadní, protože i malé nerovnováhy mohou vést k vibracím, které zhoršují přesnost. Dynamické vyrovnávání během výrobního procesu zajišťuje, že platforma pracuje hladce při všech otáčkách rotací.
6. Tepelná správa
-
Chladicí systémy: Vysoké rychlosti rotačního otočení mohou generovat teplo, což může způsobit tepelnou roztažku, což ovlivňuje přesnost. Použití aktivních chladicích systémů (jako jsou ventilátory nebo chlazení kapaliny) nebo pasivní chladicí techniky (jako jsou chladiče) mohou zabránit tepelným účinkům ovlivňování výkonu platformy.
-
Tepelná kompenzace: Některé vysoce přesné rotační platformy jsou navrženy s materiály, které mají nízké koeficienty tepelné roztažnosti, nebo se systémy, které mohou kompenzovat změny vyvolané teplotou, což zajišťuje, že platforma udržuje přesnost i v různých teplotních podmínkách.
7. Řídicí software a algoritmy
-
Algoritmy pro pokročilé ovládání: Implementace sofistikovaných algoritmů, které dynamicky upravují rychlost motoru, točivý moment a polohu na základě zpětné vazby v reálném čase, může optimalizovat rychlost otáčení a zajistit přesnou kontrolu. Tyto algoritmy pomáhají snižovat chyby způsobené vnějšími poruchami, třením a variacemi zatížení.
-
PID (proporcionálně-integrální derivativní) kontrola: Vyladěné smyčky PID mohou poskytnout lepší kontrolu nad rychlostí a polohou, opravit malé chyby v reálném čase a zlepšit celkovou přesnost. Tyto řídicí systémy nepřetržitě upravují parametry tak, aby minimalizovaly chybu mezi požadovanou a skutečnou rotací.
8. Rotační stabilita
-
Gyroskopické účinky: Vysoká rychlost otáčení může způsobit gyroskopické účinky, které mohou ovlivnit přesnost pohybu. Útoky k těmto účinkům prostřednictvím návrhu (jako je použití protiváhy nebo stabilizačních systémů) pomáhá udržovat stabilitu platformy a rotační přesnost.
-
Dynamické vyvažování: Design duté rotační platformy by měl zajistit, aby byla distribuce hmoty vyvážená, protože nerovnováha může vést k odstředivým silám, které negativně ovlivňují přesnost a hladký provoz při vysokých rychlostech.
9. Mazání
-
Pokročilé mazací systémy: Správné mazání je nezbytné pro minimalizaci tření a opotřebení na pohybujících se komponentách, zejména při vysokých otáčkách. Použití vysoce kvalitních maziv a jejich aplikaci kontrolovaným způsobem (např. Prostřednictvím automatických mazacích systémů) zajišťuje konzistentní výkon a dlouhověkost.
-
Grease vs. olej: Pro vysokorychlostní aplikace je pro udržení hladkého a přesného pohybu rozhodující výběr správného mazání-olej nebo mastnota-založená na viskozitě, tepelné stabilitě a kompatibilitě s operačním prostředím.
10. Integrace s externími systémy
-
Synchronizace s jiným zařízením: V některých aplikacích může být nutné synchronizovat duté rotační platformy s jinými stroji nebo robotickými zbraněmi. Zajištění kompatibility a synchronizace s externími systémy (jako jsou dopravníky nebo stroje CNC) prostřednictvím komunikačních protokolů nebo síťových ovládacích prvků pomáhá udržovat přesný pohyb a provoz.

Jiangsu Manchen Transmission Technology Co., Ltd. vyniká ve vytváření vlastních, spolehlivých a přesných ložisek pro různá průmyslová odvětví, neustále inovuje, aby splňovala nejvyšší standardy a hledala příležitosti pro spolupráci. Spolehlivé a stabilní dodavatel ložisek v Číně.
Produktové odkazy
Kontaktujte nás
-
Address:Č. 8, Nanqiu Road, Huangtu Town, Jiangyin City , Čína
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
